车牌定位系统的设计与实现
计算机科学与技术 201009936 王相军
指导老师 杜晓刚(讲师)
摘 要:车牌定位是车牌识别的必要条件,是实现车牌识别系统的必需步骤,对于智能交通运输系统的发展具有重要的推动作用。本文在MFC编程环境下设计并实现了一个基于图像处理关键技术的车牌定位系统。该系统首先要对原始车辆图像进行读取与显示,然后利用图像处理技术对读取的图像做一系列预处理,最后实现车牌区域的定位与输出。经实验测试表明:该系统对于车辆图像中背景相对简单及车牌自身有较少污染等情况,定位准确率可以接近90%,系统具有良好的稳定性。
关键词: 车牌识别,车牌定位,图像处理
1. 引言
目前,智能交通运输系统是世界道路交通系统的关键组成部分,其中车牌识别系统是整个智能交通运输系统的重中之重,而车牌定位是车牌识别的灵魂,车牌区域定位的精确程度直接影响后续所有操作能否正确高效的进行。因此,研究车牌定位具有重要的理论价值和实际意义。
2. 系统设计与实现
2.1 总体设计
本文车牌定位系统包括两大模块:车牌图像的预处理模块和车牌定位模块。在预处理模块中,首先要对读取的原始车辆图像做灰度化处理;其次,为了增强图像的对比度,需要做直方图均衡化处理;第三,为了消除突变的噪声点要在均衡化的基础上做平滑去噪;最后,把平滑去噪后的图像二值化,进一步做小颗粒去噪。预处理模块完成之后,就在它的基础上做车牌定位模块,进行车牌区域的精确定位。车牌定位系统的总体结构图如图1所示。
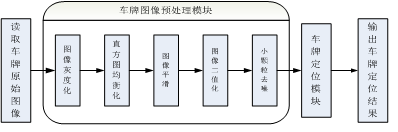
图1 车牌定位系统总体结构图
2.2 详细设计与实现
2.2.1 灰度化处理
灰度化是预处理中的第一步,也是所有后续处理的基础,因此对读取的原始图像做灰度化处理是必不可少的。图像的灰度化处理一般需要以下几个步骤:
(1)读取图像的信息,判断该图像是否为灰度图像,若是则退出,否则继续下一步;
(2)获取图像的参数;
(3)根据公式 V平均=0.30R+0.59G+0.11B ,计算每一个像素点的值,;
(4)再让原像素点的R,G,B值都等于V平均的值;
(5)最后生成灰度图像颜色表。
2.2.2 直方图均衡化算法及流程
为了提高灰度图像的对比度需要做均衡化处理,直方图均衡化的算法步骤如下:
(1)将原图像的灰度级归一化,并将得到的灰度级数记为N;
(2)按照灰度值增大累加每个灰度级的频率,这样就得到每个灰度级的累积频率;
(3)原图像的灰度范围是N个等级,把输出图像的灰度范围也取为N个等级,将每个灰度级的累积频率近似为最接近的原图像的灰度值,得到输出图像的每个灰度级上的灰度值;
(4)根据旧图像和新图像的灰度值的对应关系,计算出对应每个新图像灰度值的像素的个数;
(5)计算出每个新图像灰度值的频率,从而实现直方图均衡化。
2.2.3 图像平滑去噪
增强了图像的对比度之后需要进行去噪处理,消除一些变异的突变点。图像平滑处理的一般步骤:
(1)获取图像的参数;
(2)行处理与列处理,分别去掉边缘几行和边缘几列;
(3)计算,利用5×5的模板进行卷积运算;
(4)归一化处理;
(5)输出处理后的图像。
2.2.4 二值化处理
为了进一步做小颗粒去噪,需要把平滑去噪后的图像二值化。图像二值化的主要步骤如下:
(1)判断图像是不是灰度图像,若不是,则进行灰度化处理;若是,则继续执行下面的操作;
(2)将每个像素的灰度值与设定的阈值进行比较,大于阈值时灰度值设为255,反之为0;
(3)建立一个新视图显示二值化处理的结果。
2.2.5 小颗粒去噪
图像的小颗粒去噪实质上就是对图像进行闭合运算,主要包括两个方面:腐蚀和膨胀。
腐蚀算法的基本流程如下:
(1)获取图像参数;
(2)读取用到的结构元素;
(3)求输入图像数据的补集;
(4)判断结构元素能否可以在当前点填入目标内部;
(5)如果当前结构元素位置为1,则判断对应的图像上的像素点是否为1;
(6)如果像素点为1,则置标志位为0;
(7)判断所有像素点的标志位,如果是0,则置白;如果为1,则置黑;
(8)求出整幅图像的补集,输出结果。
膨胀算法的基本流程如下:
(1)获取图像参数;
(2)针对每个像素,判断结构元素能否填入目标内部;
(3)判断结构元素能否可以在当前点填入目标内部;
(4)如果当前结构元素位置为1,则判断对应的图像上的像素点是否为1;
(6)如果像素点为1,则置标志位为0;
(7)判断所有像素点的标志位,如果是0,则置白;如果为1,则置黑;
(8)输出结果。
2.2.6 车牌定位
通过灰度化、直方图均衡化、平滑去噪、二值化及小颗粒去噪等处理后,就可以做车牌定位了。对车牌进行定位一般需要如下几个步骤:
(1)获取预处理模块处理之后的图像参数;
(2)粗略确定牌照区域。以先列后行的顺序扫描图像,通过统计特定范围内的图像中的黑色像素点的个数,判断变化次数是否在(10,30)之间,且黑色像素点的个数大于上一次,若是,就记录下当前的行列位置,作为一个大致的搜索范围;
(3)先行后列扫描,查找车牌上边界,记为PlateCor[0],统计所有的黑色像素点,判断黑色字的像素点数是否小于20 ,若是,就说明找到了上边界;
(4)先行后列扫描,查找车牌下边界,记为PlateCor[1],具体方法同步骤(3);
(5)先列后行扫描,查找车牌左边界,记为PlateCor[2],判断黑色字的像素点数是否小于20 ,如果是,就说明找到了车牌右边界;
(6)先列后行扫描,查找车牌右边界,记为PlateCor[3]。具体方法同步骤(5);
(7)外扩。在确定的车牌区域基础上分别向上、下、左、右方向外扩5个像素;
(8)输出定位的车牌区域。
3. 系统测试
3.1 系统测试一 表1 测试一的结果
原始图片总数 |
100 |
测试成功个数 |
49 |
测试成功率 |
49% |
测试失败个数 |
49 |
测试失败率 |
49% |
异常个数 |
2 |
异常率 |
2% |
测试一是对系统做总体评估,通过100张车辆图
像的测试之后找到该系统适合定位的车辆图像类型,然后再根据找到的规律做第二次测试,系统测试一的测试结果如表一所示。
结论:成功率和失败率基本持平,成功的车辆图像的背景都相对比较简单,颜色单纯;过于复杂的背景和车牌自身的污染度会影响定位的成功率,系统不稳定是由图像的特殊性引起的。
3.2 系统测试二 表2 测试二的结果
原始图片总数 |
50 |
测试成功个数 |
44 |
测试成功率 |
88% |
测试失败个数 |
6 |
测试失败率 |
12% |
异常个数 |
0 |
异常率 |
0% |
测试二所选取的50张图像基于测试一的结论,
图像背景相对简单、车牌自身污染较轻。系统测试二的结果如表2所示。
从系统测试一和系统测试二的测试结果可以得到如下结论:本文车牌定位系统在定位背景相对简单、光线相对明朗、车牌自身无磨损、无遮掩、无严重污染的汽车牌照时准确率达到90%,系统不会发生异常,有良好的稳定性,为进行车牌识别奠定了一定的基础。
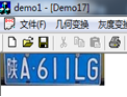
下面给出系统测试用例其中的6张定位结果,图2是定位成功的4个例子,其中图2(a)至图2(d)是原始的车辆图像,图2(e)至图2(h)是系统的定位结果;图3是定位失败的两个例子,其中图3(a)和图3(b)是原始的车辆图像,图3(c)和图3(d)是系统的定位结果。




(a) (b) (c) (d)
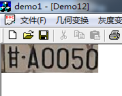

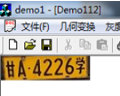
(e) (f) (g) (h)
图2 定位成功的原始图像及定位结果区域图


(a) (b) (c) (d)
图3 定位失败的原始图像及定位结果区域图
4. 结论
本文在MFC环境下设计并实现了一个基于图像处理技术的车牌定位系统。该系统对于车辆图像中背景相对简单及车牌自身有较少污染等情况,定位准确率可以接近90%,系统具有良好的稳定性,为后续进行车牌识别奠定了一定的基础。
参考文献
[1] 杨淑莹,图像模式识别—VC++技术实现[J].北京交通大学出版社,2005,35-37.
[2] 洪金丽,基于数字图像处理的车牌识别技术研究[J]. 科技资讯,2011 (19):56-56.
[3] 冯伟兴,梁洪,王臣业,Visual C++数字图像模式识别典型案例详解[J]. 北京:机械工业出版社,2012,207-239.
[4] 许伦辉,陈衍平,修科鼎,基于图像处理的静态车牌识别技术[J]. 江西理工大学学报,2011,32(001):47-50.
[5] 殷刚,贾振红,覃锡忠等,基于数字图像处理的车牌定位与识别研究[J]. 新疆大学学报: 自然科学版,2010 (3): 258-263.
Design and Implementation of License Plate Location System
Computer Science and Technology 201009936 Wangxiangjun
Supervisor Duxiaogang (Lecturer)
Abstract:License plate location is the necessary condition of license plate recognition, it is the necessary steps to realize license plate recognition system, it plays an important role for the development of intelligent transportation system. A lisence plate location was designed and implemented based on image processing key technology in MFC programming environment. First,the original vehicle image will be read and display. Secondly, using image processing technology to do a series of pretreatment. At last , the license plate area will be located and output. Experimental tests show that the system’s positioning accuracy can be close to 90% when the lisence plate is relatively simple in the image background and plate itself has less pollution, and so on , the system has good stability,too.
Keywords: license plate recognition,license plate localization,image processing
 甘公网安备62010502000995号 陇ICP备14001560号-2 设计制作 宏点网络
甘公网安备62010502000995号 陇ICP备14001560号-2 设计制作 宏点网络
