隧道裂缝检测智能车设计
电子信息工程 201010209 王凯
指导老师 沈瑜(副教授)
摘 要:本文所介绍的隧道裂缝智能检测车是一种“面性分析法”的动态检测方法。隧道裂缝智能检测车通过一个180° 鱼眼镜头实时全方位采集隧道内面信息,通过图像处理器的处理,形成计算机可以处理的高压缩比的数字图像,并且对保存的数字图像进行高斯平滑、去除噪声、轮廓提取等预处理,从而得到隧道内面的信息参数。
在隧道裂缝检测车的具体实现过程中将CCD采集视频信息通过帧提取的方式保存JPEG格式,通过上位机图像处理系统,进行镜头畸变矫正,有效克服了镜头畸变所造成的影响。使用多种图像分割算法对隧道轮廓进行提取,保证了对隧道图像真值点选取的精度。最终的测量结果是使用图像融合补偿,消除车体晃动对结果数据的影响,使精度进一步提高。
关键字:隧道裂缝检测 ,图像处理 ,图像压缩 ,边缘提取
1 前言
在大量研究国内外的各种测量方法的基础上,结合国内运输的特点,本文所介绍的隧道限界智能检测车采用一种“面性分析法”的动态检测装置。隧道限界智能检测车通过一个180°鱼眼镜头实时全方位采集隧道内面信息,通过图像处理器的处理,形成计算机可以处理的高压缩比的数字图像,并且对保存的数字图像进行高斯平滑,去除噪声,轮廓提取等预处理,从而得到隧道内面的信息参数,如隧道采集路程,任意采集高度,以及裂缝宽度等,为铁路运输提供可靠依据。
2 系统工作原理
2.1 系统硬件构成
整个裂缝检测系统设计成车载结构,以一定的速度在隧道中运行,通过高精度电荷耦合器件(Charge coupled device, CCD)相机采集衬砌表面的裂缝图像,如图所示。
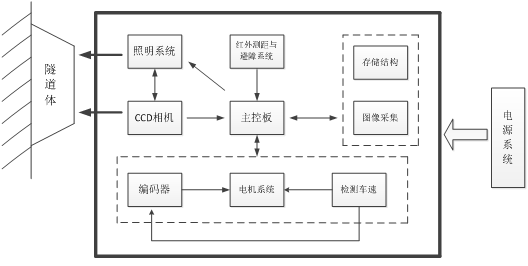
图2-1 系统总体框图
2.1.1 系统主控设计
智能车主控采用ATMEGA128单片机,ATmega128是一款为基于AVR RISC结构的8位低功耗CMOS微处理器。由于其先进的指令集以及单周期指令执行时间,ATmega128 的数据吞吐率高达1 MIPS/MHz,从而可以缓减系统在功耗和处理速度之间的矛盾。其内核具有丰富的指令集和32个通用工作寄存器。所有的寄存器都直接与算术逻辑单元(ALU) 相连接,使得一条指令可以在一个时钟周期内同时访问两个独立的寄存器。这种结构大大提高了代码效率,并且具有比普通的复杂指令集微处理器高10倍的数据吞吐率。
ATmega128具备128K 字节的系统内可编程Flash(具有在写的过程中还可以读的能力,即RWW)、4K 字节的EEPROM、4K 字节的SRAM、53个通用I/O 口线、32个通用工作寄存器、实时时钟RTC、4个灵活的具有比较模式和PWM 功能的定时器/ 计数器(T/C)、两个USART、面向字节的两线接口TWI、8 通道10 位ADC( 具有可选的可编程增益)、具有片内振荡器的可编程看门狗定时器、SPI 串行端口、与IEEE 1149.1 规范兼容的JTAG 测试接口( 此接口同时还可以用于片上调试),以及六种可以通过软件选择的省电模式。
2.1.2 VC0706数字图像处理器
系统图像处理器采用中星微VC0706数字图像处理器,VC0706是一个增强的图像处理功能的高性能处理器。该芯片具备CMOS图像传感器接口和数字视频输入接口,可以捕获从CMOS传感器或外部电视解码器的视频流,实现视频增强,OSD覆盖和运动检测,数字视频通过CCIR656格式输出接口,使VC0706可以很容易地被连接到外部的DSP /主机处理器进一步视频处理,如压缩和广播。外部主机处理器可以控制通过灵活的VC0706的 SPI、UART接口进行通信。VC0706内嵌硬JPEG编解码器,支持高达30fps的编码或解码与VGA分辨率VC0706可以压缩捕获的视频流的M-JPEG流,通过SPI、UART接口输出,或接收外部主机的M-JPEG流,进行解码和输出。
2.1.3 V-MT9V0数字图像传感器
图像采集传感器采用中星微的V-MT9V011图像传感器,它是一个1/4英寸的VGA格式CMOS有源像素数字图像传感器。该传感器的有效成像像素阵列649H x489V。它采用先进的图像功能如窗口,列和行镜像。它通过一个简单的两线串行总线接口编程,并具有非常低的功耗。并且具有2DigitalClarity™-Micron的突破性的低噪声CMOS成像技术,达到CCD图像质量(基于信号-噪声比和低光灵敏度),同时保持 CMOS的固有尺寸,成本和集成的优点。
2.1.3 文件存储系统
基于系统设计要求,对文件存储实时性较高,存储量较大,灵活性较高,系统选用SD卡作为系统的存储设备,SD(Secure Digital Memory Card)是一个新的大容量存储系统,是基于半导体技术的变革。SD卡是一种为满足安全性、容量、性能和使用环境等各方面的需求而设计的一种新型存储器件,它的出现提供了一种便宜的、结实的卡片式的存储媒介。SD卡高度集成闪存,具备串行和随机存取能力,可以通过专用优化速度的串行接口进行访问,数据传输可靠。
2.1.4 无线系统设计
系统需要实时叫互信息,稳定可靠地无线传输系统是必要的保障,经比较本系统采用NRF2401作为无线系统的主要传输模块。nRF2401是一款新型单片射频收发器件,工作于2.4 GHz~2.5 GHz ISM频段。内置频率合成器、功率放大器、晶体振荡器、调制器等功能模块,并融合了增强型ShockBurst技术,其中输出功率和通信频道可通过程序进行配置。nRF2401功耗低,在以-6 dBm的功率发射时,工作电流也只有9 mA;接收时,工作电流只有12.3 mA,多种低功率工作模式(掉电模式和空闲模式)使节能设计更方便。内部FIFO的确保无线前端和系统的MCU之间的平滑的数据流。nRF2401 +支持250 kbps、1 Mbps和2Mbps的空中数据速率。
2.1.5 红外测距系统设计
由于要实时采集隧道当前宽度,记录位置信息,所以本智能车车载一款SHARP出厂的GP2Y0A21YK0F远距离红外传感器,GP2Y0A21YK0F是一个距离测量传感器单元,由PSD集成组合(位置敏感探测器),红外发光二极管和信号处理电路组成。由于采用了三角剖分方法,距离检测不易受到物体的反射率,环境温度和运行时间影响。该装置输出对应的电压探测距离。该传感器也可以用来作为接近传感器。
2.1.6 智能车电机控制
智能车驱动部分采用4个直流电机驱动,主控通过PWM 控制直流电机转速,通过改变加到直流电机电枢两端的直流驱动电压,即可改变电机的转速;改变该驱动电压的极性,即可改变电机的旋转方向。使用PWM(脉宽调制)方法,可以方便地改变加给电机电枢的平均电压的大小。
3 系统软件设计流
系统软件流程采分两部分处理,一路进行图像采集,一路进行定点标注。
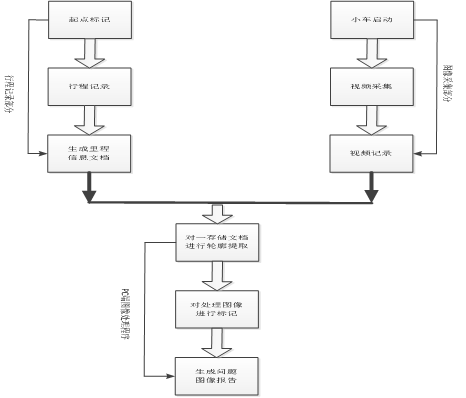
图3-1 系统软件运行流畅图
4 实验结果分析
通过实际采集分析,并且结果上位机处理后,呈如下结果:

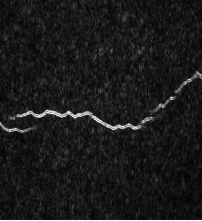
图3-1原图像 图3-2 Prewitt算子处理结果
如图所示,实验结果达到预期要求,图像采集清晰可靠,上位机处理检测精准,处理合适
5 总结与展望
5.1总结
本文的主要贡献在于在总结国内外隧道检测技术的基础上,结合中国铁路现状,提出基于“面性分析法”的隧道检测方案,并且进行了实现。
5.2展望
隧道裂缝检测是铁路公务部门急待解决的问题,对于大净空,高精度动态检测的难度很大。涉及的专门理论多,有些问题还需要通过大量的试验完成。因此,对于隧道检测车而言,还有许多工作需要认真细致地进行研究。有许多功能还需要继续改进完善。例如洞口测量问题,雨雪天气的影响,摄像机的同步等问题尚待解决。
隧道裂缝检测技术综合了图像处理技术,视频压缩技术,模式识别等多学科的知识。它与这些学科密切联系,很大程度上受到这些学科的影响。随着多媒体技术的日益成熟,隧道裂缝检测技术也会愈发的成熟和完善。
参考文献
[1] 朱力强. 隧道限界检测车图像采集系统的研制[D].北京,北京交通大学1997,97-103
[2] 精英科技编著.视频压缩与音频编解码技术,北京,中国电力出版社 2002,59-63
[3] 张益贞,刘滔. MPEG/JPEG 编解码技术.北京,人民邮电出版社,2003,150-152
[4] 杨枝灵,王开.《数字图像获取处理及实践应用》.北京.人民邮电出版社,2003,18-21,130-132,535-537
[5] Joint Video Team (JVT) of ISO/IEC MPEG & ITU-T VCEG(ISO/IEC JTCI/SC29/WGI1 and ITU-T SG16 Q.6), Document:JVT-F077.6th Meeting: Awaji, Island, JP , 2002,12: 5-13
Tunnel Crack Detection Intelligent Vehicle Design
Electrical Information Engineering 201010209 wangkai
Instructor Shen Yu (lecturer)
Abstract:The primary objectives of the investigation are to introduce Tunnel Crack Intelligent Detection Vehicle, a dynamic detection device using the method of surface analysis. Using a 180° fish-eye lens, it can real-time collect information of the inside of the tunnel in all directions, and the image processor is used to generate high-compression images, well then a series of pretreatments including Gussian smoothing, noise elimination, contour extraction are carried out on the digital images saved , to get the information of the inside of the tunnel.
Key words: tunnel crack detection,image processing,video compression,edge extracting
 甘公网安备62010502000995号 陇ICP备14001560号-2 设计制作 宏点网络
甘公网安备62010502000995号 陇ICP备14001560号-2 设计制作 宏点网络
